深度win10- 绿色安全免费的win10系统下载站
自助下单地址(拼多多砍价,ks/qq/dy赞等业务):点我进入
1 实现内容
(1)家政服务机器人要求为移动车体,具有机械手;
(3)实现机械手臂简单操作;
(4)通过蓝牙实现“安卓”对机器人的无线控制;
(5)实现自动定位。
作为语音识别系统,当需要对输入语音信号进行识别时,如果不能对于大部分人群进行准确识别,将大大降低系统的实用性。只有对于普通话发音进行准确识别,才可以得到广泛的应用。 本系统通过在安卓平台调用Google Voice Search引擎实现了此功能,通过这种方式,可以准确识别语音输入命令,大大的提供了系统的性能。同时stm32硬件设计指南,上位机通过识别说话人的语音信息,将此信息通过蓝牙模块发送至下位机。通过下位机控制机器人的动作,可使机器人进行前后左右的移动和手部的动作。
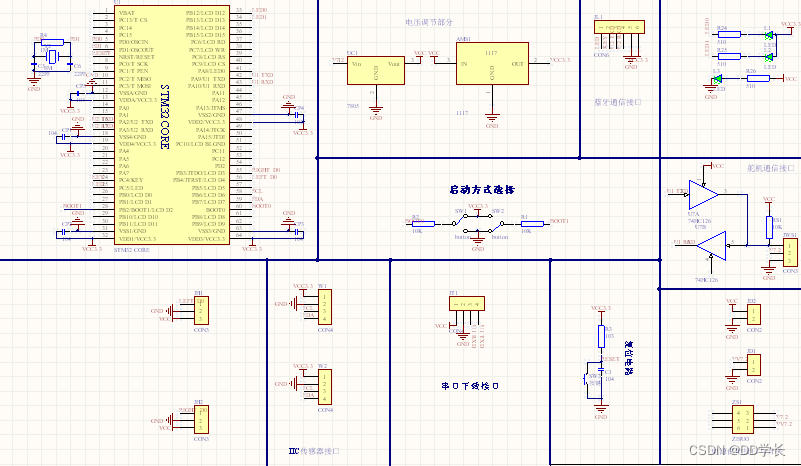
2 硬件设计
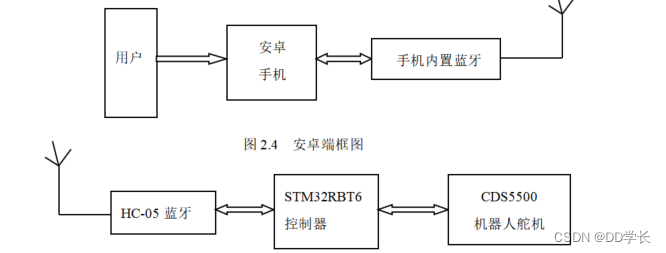
通过系统方案的分析,并结合实际需求我选择语音识别方案二和自动定位方案二作为系统设计方案。这是由于在本系统中,我们可以在安卓平台通过使用Google Voice Search引擎很方便的实现对家政机器人的语音控制。同时,安卓平台也能够很方便的通过蓝牙与机器人进行通信。本系统的安卓端控制软件可以运行在任何安卓手机,故基于本系统有很强的通用性。本系统的安卓端、机器人端结构框图如图所示。通过图中所示,可以对系统有个大致了解。
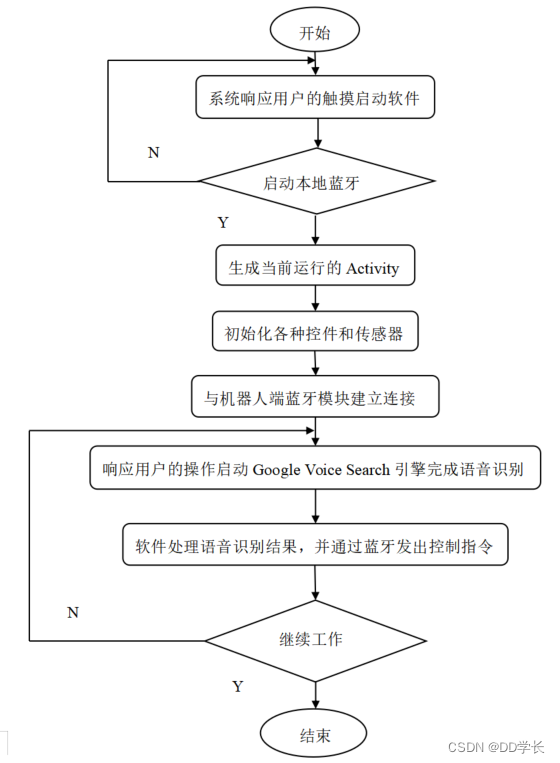
3 软件设计 3.1 安卓端
本系统中安卓端软件为运行在操作系统中的软件,这就需要我从操作系统的层面来考虑软件的内部架构,以使得软件能够在启动操作系统后所剩无多的资源下高效的运行
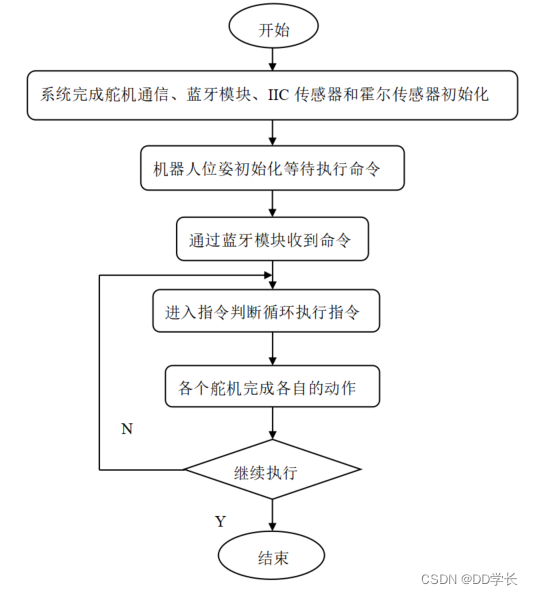
3.2 小车端
机器人端程序主要实现通过HC-05蓝牙模块接收用户的指令stm32硬件设计指南,然后控制机器人完成相应的动作。在程序运行过程中还要涉及到各个模块和传感器的初始化,以及各个模块与控制器的实时通信。
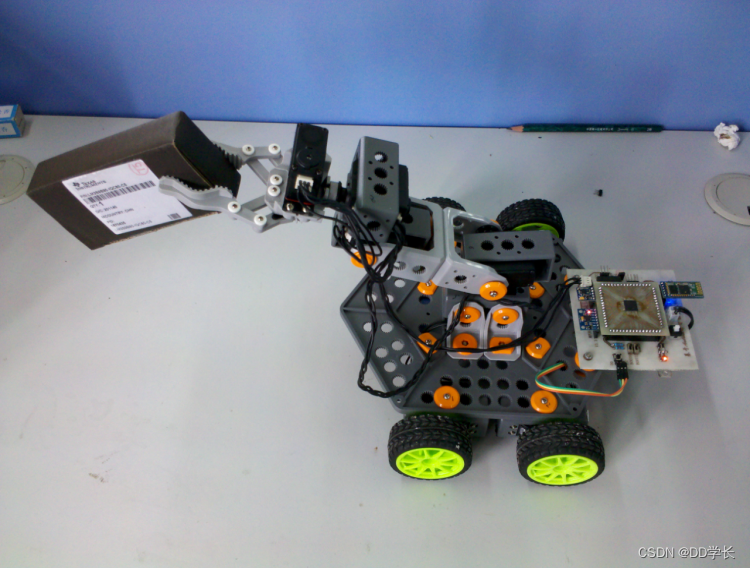
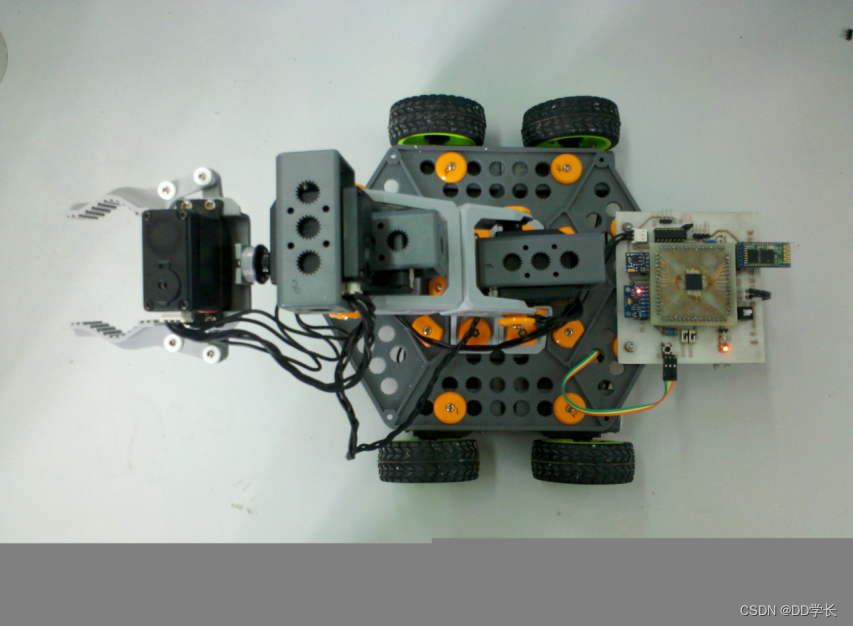
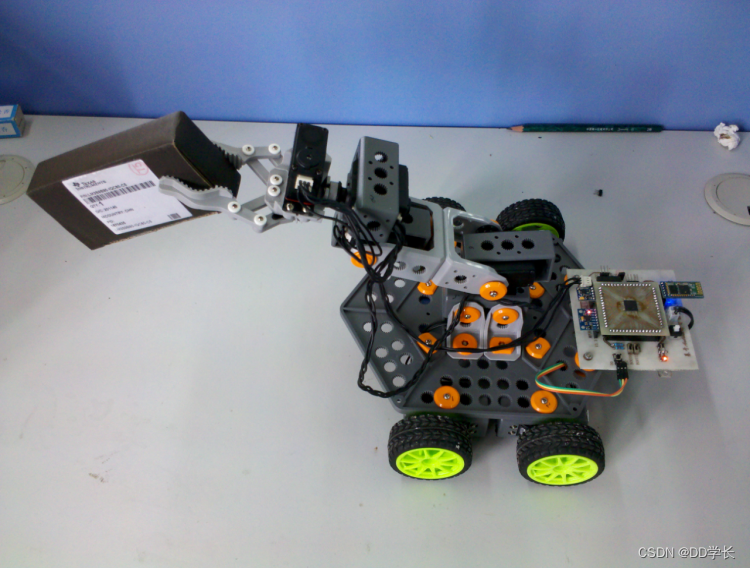
4 实现效果
下图为机器人正常启动之后的效果图
下图为安卓端软件正常启动后效果图

5 最后
更多精彩:office2010永久激活工具www.win7gw.com

2022-03-03 /

系统之家WINDOWS 10 X64完美专业版 2022.03
2022-03-03 /
2022-02-28 /
2022-02-28 /
2022-02-23 /
2022-02-23 /
2022-02-23 /
2022-02-23 /
2022-02-17 /
 电脑怎么样添加打印机驱动 钻城卡盟-全国十大卡盟排行2023-04-11
电脑怎么样添加打印机驱动 钻城卡盟-全国十大卡盟排行2023-04-11
 stm32硬件设计指南 qq空间农场卡盟辅助2023-04-11
stm32硬件设计指南 qq空间农场卡盟辅助2023-04-11
 快手1000万分(快手1000万分多少钱pk)-2023-04-11
快手1000万分(快手1000万分多少钱pk)-2023-04-11
 qq空间说说赞平台-qq说说赞在线自助下单2023-04-11
qq空间说说赞平台-qq说说赞在线自助下单2023-04-11
 刷qq空间访客-空间访客刷人气网站2023-04-11
刷qq空间访客-空间访客刷人气网站2023-04-11
 名片赞10000只需02元-名片赞10000只需02元网站2023-04-11
名片赞10000只需02元-名片赞10000只需02元网站2023-04-11
 空间访客量在线刷-空间访客量免费2023-04-11
空间访客量在线刷-空间访客量免费2023-04-11
 外媒曝光:三星 Galaxy S21 系列将有绿色版本2021-01-19
三星制定保守的 Galaxy S21 5G 出货量目标:2600 万部,跟 S20 系列相同2021-01-26
外媒曝光:三星 Galaxy S21 系列将有绿色版本2021-01-19
三星制定保守的 Galaxy S21 5G 出货量目标:2600 万部,跟 S20 系列相同2021-01-26
 荣获科学技术奖,腾讯携手合作伙伴助力移动互联网数字娱乐产业创新2021-01-21
荣获科学技术奖,腾讯携手合作伙伴助力移动互联网数字娱乐产业创新2021-01-21
 Intel暗示首款桌面独显DG2今年发布:高性能没跑了2021-01-19
Intel暗示首款桌面独显DG2今年发布:高性能没跑了2021-01-19
 基于安卓 11:国行三星 Galaxy Note 20 系列推送 One UI 32021-01-28
荣耀 V40 通过 3C 认证,支持 66W 快充2020-12-19
OPPO Find X3 Pro 官方宣传图、相机参数曝光:搭载 25 倍变焦微距镜头2021-02-03
基于安卓 11:国行三星 Galaxy Note 20 系列推送 One UI 32021-01-28
荣耀 V40 通过 3C 认证,支持 66W 快充2020-12-19
OPPO Find X3 Pro 官方宣传图、相机参数曝光:搭载 25 倍变焦微距镜头2021-02-03
 不止 V40,荣耀商城测试网页源代码曝光:5 款新品有望集中发布2021-01-08
不止 V40,荣耀商城测试网页源代码曝光:5 款新品有望集中发布2021-01-08
 京东推出京造 NVMe 固态硬盘:1TB 预约价 699 元起2021-01-29
京东推出京造 NVMe 固态硬盘:1TB 预约价 699 元起2021-01-29
 彭博社记者 Mark Gurman:苹果 2021 款 iPad Pro A14X 处理器性能比肩 M12021-03-01
彭博社记者 Mark Gurman:苹果 2021 款 iPad Pro A14X 处理器性能比肩 M12021-03-01